martes, 24 de febrero de 2015
lunes, 23 de febrero de 2015
Porque no darse la vuelta por aquí? :)
Hoy los invitamos a clikear el siguiente link y descubrir los conceptos de los diferentes vectores unitarios, tangente y normal, el documento la verdad es breve y claro en los conceptos. Espero les guste.
http://blog.utp.edu.co/eduardriverah/files/2014/06/VectoresUnitarios.pdf
http://blog.utp.edu.co/eduardriverah/files/2014/06/VectoresUnitarios.pdf
domingo, 22 de febrero de 2015
Animación del Vector Aceleración
También los exhortamos a visitar esta página la cual nos explica de forma parecida al link anterior, como actúa el vector aceleración.
http://www.educaplus.org/play-314-Aceleraci%C3%B3n-normal.html?PHPSESSID=82a3224651187784cf60e1137973189b
http://www.educaplus.org/play-314-Aceleraci%C3%B3n-normal.html?PHPSESSID=82a3224651187784cf60e1137973189b
Vector Velocidad
Les invitamos a darse la vuelta por esta página que nos pareció muy interesante e interactiva donde nos explican de una forma sencilla lo básico en el vector velocidad.
http://www.educaplus.org/play-296-Vector-velocidad.html
http://www.educaplus.org/play-296-Vector-velocidad.html
viernes, 20 de febrero de 2015
Ejemplo de Vector Normal en una Recta
Si la recta es  el vector dirección es v(7,-1) y el vector normal es n(1,7) .
el vector dirección es v(7,-1) y el vector normal es n(1,7) .
En esta escena le hemos llamado a v(a,b) y a n(c,d)
Cambia a y b, para que sea v(6,-3)
Verás que ahora el ángulo que forma n con la recta no es de 90º.
Tendrás que cambiar c y d para que sea n(3,6) y entonces tendremos el ángulo de 90º, o sea ahora n si es perpendicular a la recta.
Prueba tú a cambiar a, b, c y d, de tal forma que el ángulo sea de 90º.
el vector dirección es v(7,-1) y el vector normal es n(1,7) .En esta escena le hemos llamado a v(a,b) y a n(c,d)
Cambia a y b, para que sea v(6,-3)
Verás que ahora el ángulo que forma n con la recta no es de 90º.
Tendrás que cambiar c y d para que sea n(3,6) y entonces tendremos el ángulo de 90º, o sea ahora n si es perpendicular a la recta.
Prueba tú a cambiar a, b, c y d, de tal forma que el ángulo sea de 90º.
APLICACIÓN DE LOS VECTORES A PROBLEMAS MÉTRICOS
Como vimos en la unidad de vectores, el producto escalar sirve para hallar el módulo de un vector y el ángulo entre dos vectores. Ahora vamos a utilizar esa herramienta para hallar distancias y ángulos entre rectas.
Se le llama vector normal a una recta a cualquier vector perpendicular a ella.
 Recta en paramétricas El vector (d,-b) es normal a r, pues es perpendicular a su vector dirección (b,d): (d,-b).(b,d) = db-bd = 0
Recta en paramétricas El vector (d,-b) es normal a r, pues es perpendicular a su vector dirección (b,d): (d,-b).(b,d) = db-bd = 0
Recta en implícita :Ax + By + C = 0 : El vector (A,B) es normal a r
Justificación de que (A,B) es perpendicular a Ax + By + C = 0:
Si P(x1,y1) y Q(x2,y2) pertenecen a la recta, sus coordenadas cumplen la ecuación:
Ax2 + By2 + C = 0
Ax1 + By1 + C = 0
Restando: A(x2-x1) + B(y2-y1) = 0
Esta última igualdad significa que (A,B).(x2-x1,y2-y1) = 0
 Es decir el vector de coordenadas (A,B) es perpendicular a un vector dirección de r, PQ y, por tanto, es normal a r.
Es decir el vector de coordenadas (A,B) es perpendicular a un vector dirección de r, PQ y, por tanto, es normal a r.
Se le llama vector normal a una recta a cualquier vector perpendicular a ella.
Recta en paramétricas El vector (d,-b) es normal a r, pues es perpendicular a su vector dirección (b,d): (d,-b).(b,d) = db-bd = 0Recta en implícita :Ax + By + C = 0 : El vector (A,B) es normal a r
Justificación de que (A,B) es perpendicular a Ax + By + C = 0:
Si P(x1,y1) y Q(x2,y2) pertenecen a la recta, sus coordenadas cumplen la ecuación:
Ax2 + By2 + C = 0
Ax1 + By1 + C = 0
Restando: A(x2-x1) + B(y2-y1) = 0
Esta última igualdad significa que (A,B).(x2-x1,y2-y1) = 0
Vector normal a la superficie
Un vector se dice normal a una superficie en un punto si es perpendicular al plano tangente en dicho punto de la superficie. Esa propiedad nos dice que un vector normal es perpendicular a cualquier otro vector contenido en el plano tangente.
Si tomamos dos vectores diferentes y tangentes a la superficie en un punto su producto vectorial será perpendicular a ambos y por tanto perpendicular a cualquier combinación lineal de ambos, es decir, perpendicular a todo el plano generado por estos dos vectores. Podemos aprovechar esa propiedad para calcular el vector normal simplemente como el producto vectorial de los dos vectores linealmente independientes dados por la parametrización de la superficie. Así el vector normal puede calcularse como:

Si se conoce en cambio la ecuación de la superficie f(x, y, z) = 0 entonces el vector unitario normal se calcula simplemente como:

Si tomamos dos vectores diferentes y tangentes a la superficie en un punto su producto vectorial será perpendicular a ambos y por tanto perpendicular a cualquier combinación lineal de ambos, es decir, perpendicular a todo el plano generado por estos dos vectores. Podemos aprovechar esa propiedad para calcular el vector normal simplemente como el producto vectorial de los dos vectores linealmente independientes dados por la parametrización de la superficie. Así el vector normal puede calcularse como:
Si se conoce en cambio la ecuación de la superficie f(x, y, z) = 0 entonces el vector unitario normal se calcula simplemente como:
Vectores | El Universo Mecánico
Universo Mecánico es un conjunto de vídeos que enseñan diferentes ramas de la física y la matemática. En cada inicio de tema, el video te va introduciendo a cómo ese tema fue concebido por quienes fue, y su desempeño en nuestra vida.
Cálculo Vectorial
Hoy los invitamos a darse la vuelta por esta pagina que nos da una explicación breve y muy fácil sobre todo lo correspondiente al cálculo vectorial, usos y aplicaciones, junto con ejemplos que nos ayudan a tener una idea de para que podemos usar vectores.
martes, 17 de febrero de 2015
Vector Unitario Ortogonal
Una base de un espacio vectorial es ortogonal cuando los vectores que la forman son perpendiculares dos a dos.
Una base de un espacio vectorial es ortonormal cuando es una base ortogonal y sus vectores son unitarios
Descriptores: Espacio euclídeo
Álgebra
Ejemplo:
a. Comprobar que los vectores (3,1)(−2,6) es una base ortogonal de R2
b. Comprobar que los vectores (3/10−−√,1/10−−√)(−2/40−−√,6/40−−√) de R2 forman una base ortonormal
a. Los vectores u=(3,1),v=(−2,6) forman una base
Son linealmente independientes
λu+μv=λ(3,1)+μ(−2,6)=(3λ,λ)+(−2μ,6μ)=(3λ−2μ,λ+6μ)=(0,0)⇒3λ−2μ=0,λ+6μ=0⇒λ=μ=0
Es un sistema de generadores
λu+μv=λ(3,1)+μ(−2,6)=(3λ,λ)+(−2μ,6μ)=(3λ−2μ,λ+6μ)=(x,y)⇒3λ−2μ=x,λ+6μ=y⇒λ=3x+y10μ=y−7x10
Son ortogonales, hacemos el producto escalar de los dos vectores
(3,1)⋅(−2,6)=(3(−2)+6)=0⇒cosα=0⇒α=90º
El ángulo que forman los dos vectores es un ángulo recto, porque el producto escalar vale cero.
b. Como ∥(3,1)∥=10−−√, el vector u1=(3/10−−√,1/10−−√) es el vector unitario en la dirección del vector u=(3,1)
y como ∥(−2,6)∥=40−−√ el vector v1=(−2/40−−√,6/40−−√) es el vector unitario en la dirección del vector v=(−2,6). Por lo tanto:
Los vectores u1,v1 forman una base ortonormal
Una base de un espacio vectorial es ortonormal cuando es una base ortogonal y sus vectores son unitarios
Descriptores: Espacio euclídeo
Álgebra
Ejemplo:
a. Comprobar que los vectores (3,1)(−2,6) es una base ortogonal de R2
b. Comprobar que los vectores (3/10−−√,1/10−−√)(−2/40−−√,6/40−−√) de R2 forman una base ortonormal
a. Los vectores u=(3,1),v=(−2,6) forman una base
Son linealmente independientes
λu+μv=λ(3,1)+μ(−2,6)=(3λ,λ)+(−2μ,6μ)=(3λ−2μ,λ+6μ)=(0,0)⇒3λ−2μ=0,λ+6μ=0⇒λ=μ=0
Es un sistema de generadores
λu+μv=λ(3,1)+μ(−2,6)=(3λ,λ)+(−2μ,6μ)=(3λ−2μ,λ+6μ)=(x,y)⇒3λ−2μ=x,λ+6μ=y⇒λ=3x+y10μ=y−7x10
Son ortogonales, hacemos el producto escalar de los dos vectores
(3,1)⋅(−2,6)=(3(−2)+6)=0⇒cosα=0⇒α=90º
El ángulo que forman los dos vectores es un ángulo recto, porque el producto escalar vale cero.
b. Como ∥(3,1)∥=10−−√, el vector u1=(3/10−−√,1/10−−√) es el vector unitario en la dirección del vector u=(3,1)
y como ∥(−2,6)∥=40−−√ el vector v1=(−2/40−−√,6/40−−√) es el vector unitario en la dirección del vector v=(−2,6). Por lo tanto:
Los vectores u1,v1 forman una base ortonormal
Cómo encontrar el vector unitario paralelo al gráfico
 Los vectores paralelos van infinitamente en dos direcciones sin tocarse. Un gráfico y su vector paralelo comparten, por lo tanto, una inclinación o pendiente idéntica. Cualquier gráfico tiene un número infinito de vectores que tienen la misma pendiente y van paralelos a él, pero cualquier punto en los ejes separado del gráfico tiene sólo un vector paralelo a la línea original. La ecuación de este vector incorpora su inclinación y una constante adicional, la intercepción del vector con el eje y.
Los vectores paralelos van infinitamente en dos direcciones sin tocarse. Un gráfico y su vector paralelo comparten, por lo tanto, una inclinación o pendiente idéntica. Cualquier gráfico tiene un número infinito de vectores que tienen la misma pendiente y van paralelos a él, pero cualquier punto en los ejes separado del gráfico tiene sólo un vector paralelo a la línea original. La ecuación de este vector incorpora su inclinación y una constante adicional, la intercepción del vector con el eje y.Instrucciones
1. Identifica las coordenadas de dos puntos en el gráfico. Para este ejemplo, imagina puntos en (3, 6) y (8, 2).
2. Divide la diferencia entre las coordenadas y de estos puntos por la diferencia entre sus coordenadas x: (6 - 2) ÷ (3 - 8) = -0,8. Identifica la inclinación del gráfico y su vector paralelo.
3. Escoge el punto en el que el vector unitario paralelo debe pasar. Para este ejemplo, calcula el vector por el punto (9, -3).
4. Multiplica la inclinación del vector por la coordenada x del punto: -0,8 × -3 = 2,4.
5. Resta esta respuesta de la coordenada y del punto: 9 - 2,4 = 6,6.
6. Sustituye este resultado y la inclinación común de las líneas como "c" y "m" en la ecuación "y = mx + c". Con este ejemplo, esto produce "y = -0,8x + 6,6". Esta es la ecuación para el vector unitario paralelo al gráfico.
Ingenieria Civil y los vectores
En la ingeniería civil, una de las principales aplicaciones del cálculo vectorial se encuentra en la rama del diseño de vías y carreteras, más específicamente, en la curvatura de estas construcciones. En primer lugar hay que saber que toda carretera se compone de tres tipos de curvaturas, estos son: las rectas, las curvas de transición y la curva como tal.
En las rectas, la curvatura es igual a cero; en las curvas de transición, la curvatura es variable y en la curva como tal, la curvatura es constante. En este blog, se intentara explicar y hacer un especial énfasis en las curvas de transición, es decir, con curvatura variable.
FUNCIÓN:
El objetivo principal de las curvas de transición consiste en evitar varias discontinuidades en la curvatura de la carretera. Teniendo en cuenta esto, las curvas de transición deben cumplir con las mismas condiciones de seguridad y de estética de toda la carretera.
FORMA Y CARACTERISTICAS:
En la mayoría de los casos, la curva más aceptada para el diseño de carreteras es la clotoide. Esta curva se representa por la ecuación:

Donde:
R es el radio de la curvatura en cualquier punto.
L es la longitud de la curva desde su punto de inflexión y el punto de radio R.
A es el parámetro de la clotoide, este es característico de la clotoide.
El punto de inflexión de la curvatura se halla en el momento en que el radio es infinito.
Tips para resolver problemas
Haz siempre un diagrama de la situación que se describe
Como dicen, una imagen dice más que mil palabras. Hacer un diagrama de la situación es una fantástica ayuda para tener una buena visión del problema. Distingue claramente el o los elementos principales (partículas o cuerpos) del problema. Indica con vectores las velocidades, aceleraciones, fuerzas o cualquier otra cantidad vectorial relevante usando una flecha que apunte en la dirección correcta. Escoge y escribe una variable algebraica para denotar cada cantidad física importante en el problema. Identifica cuáles de éstas conoces y cuáles no, así como la cantidad que se te pide calcular.
Resuelve los problemas de forma algebraica; no calcules valores numéricos intermedios
En física es importante aprender a abstraer las cantidades involucradas en un problema. Si nos dicen que un objeto se mueve a 12 m/s, es preferible representarlo mediante una variable algebraica (por ejemplo, v), y resolver el problema usando esta variable en lugar del valor numérico. Sólo al final, cuando se obtenga el resultado (algebraico) del problema, sustituiremos cada variable por su valor numérico (si es que se pide un resultado numérico – y esto será cada vez menos común conforme cursen materias más avanzadas).
Dar una respuesta de forma algebraica tiene muchas ventajas:
- Nos da información sobre cómo se relacionan físicamente las distintas cantidades involucradas en el problema. Por ejemplo, cuando se expresa un resultado de forma algebraica resulta evidente de cuáles cantidades depende y de cuáles no.
- Es menos probable cometer un error en la calculadora si se obtiene el resultado final en una sola evaluación.
- Se produce un resultado numérico más preciso pues no se acumulan los errores de redondeo que se introducen al usar resultados intermedios.
- Se practica la manipulación algebraica, herramienta que es importante en todo el estudio de la física.
Aplicaciones de los Vectores en la Ingenieria
Aplicaciones del Vector en la Ingeniería
Mencionare tres ramas de la Ingeniería:
Aplicación de vectores en Ingeniería De
Sistemas
Los vectores (llamados matrices en Ingeniería sistemas) se
utilizan en el cálculo numérico, En la resolución de sistemas de ecuaciones
lineales, De las ecuaciones diferenciales y de las derivadas
parciales. Además de su utilidad para el estudio de sistemas de ecuaciones
Lineales, las matrices aparecen de forma natural en geometría, estadística,
Economía, informática, física, etc...
Los vectores de Radar de navegación aérea para
evitar situaciones de emergencia,
Curso, derrota, Rumbo y marcación definido
por vectores Aplicación de vectores en la Ingeniería de sistemas.

Como vemos en la imagen, el radar sirve detecta la posición de las personas y da su ubicación a través de vectores.
Aplicación de Vectores en la Ingeniería
Industrial
Los vectores en la ingeniería industrial sirven para
resolver problemas de estática (de composición de fuerzas, por ejemplo las
fuerzas que actúan sobre un puente o un edificio o las fuerzas que actúan sobre
los piñones de una rueda dentada, etc ...)

Muestra de un diagrama de bloques y vectores del lazo iterativo general de un circuito Térmico equivalente.
Aplicación de Vectores en la Ingeniería
Civil
Los vectores dentro de la Ingeniería Civil se aplican
por ejemplo si haces diseñar un techo de armadura,
La base de una columna. Necesitas la descomposición para conocer el momento
Falta mencionar cálculo anti sísmico y una variedad de aplicaciones. Sin
descomposición de vectores no hay estática y sin ella no hay ingeniería civil.

La obtención de esta matriz es fundamental siempre que se aplique el Método de la rigidez con enfoque matricial. Sustituyen en la ecuación (1) la matriz rigidez (K) y el vector de los términos independientes (P) se obtienen los desplazamientos lineales y angulares en cada nivel del edificio.
lunes, 16 de febrero de 2015
Aplicaciones de los Vectores en la Vida Diaria
Aplicaciones en la Vida Diaria
Ahora si resolviendo la
interrogante hemos oído hablar de que los juegos de la computadora, las nuevas películas
animadas, etc. Todas estas cosas están hechas con gráficos vectoriales, pero no
sólo en la animación ni en estos casos están presentes los vectores, estos
también rigen el transporte aéreo, el desplazamiento de los
barcos, y en general la física, Por ejemplo acá pongo 8 aplicaciones diríamos diarias
sobre los vectores en la cual podría servir a gran parte de la
gente, pero eso si aplicada sobre una base personal:
1. Para levantar un objeto
pesado y no lastimarte la espalda.
2. Para la navegación aérea.
3. Para jugar
billar.
4. Para mejorar tu rendimiento en cualquier deporte que practiques.
5.
Para usar cualquier tipo de herramienta de la manera adecuada.
6. Para mejorar los
Radares.
7.Para la navegación marítima.
8. Para entender cómo funciona toda la
tecnología que usas (internet, móvil, PC, etc.) y así puedas encontrar las
fallas cuando las tengas

Tutorial para Resolver Vectores
Vectores
Formas de representar a un Vector
Un vector puede ser expresado y dibujado siguiendo una sola dirección o utilizando un eje de coordenadas x-y llamado plano cartesiano en la vida real este vector puede ser representado en 3 dimensiones en el eje x-y-z.
Ejm:
͢
Dado el vector: P =(-6,10)m transformar a todas las formas
- Para empezar a resolver el problema debemos observar en qué forma esta el vector, en este caso el vector esta en forma rectangular.
- Debemos tomar en cuenta que datos son los que requerimos y los que ya tenemos para representar en las otras formas:
Entonces:
Px= -6
Py= 10
͢
|P|=?
Ɵ= ?
En este caso conocemos las componentes en “x” y en “y” y desconocemos cual es el módulo y la dirección entonces proseguiremos a encontrar el módulo, para hallar el módulo utilizamos el teorema de Pitágoras el cual dice que la hipotenusa al cuadrado es igual a la suma del primer cateto al cuadrado y el segundo cateto al cuadrado entonces:
a2 +b2 = c2 Y esto es: c= a2 +b2
Para obtener el módulo reemplazamos la hipotenusa por el módulo y los catetos por la componente rectangular en “x” y la componente rectangular en “y” respectivamente entonces:
P=11,66
Para encontrar la dirección utilizamos la fórmulaa
Ɵ=tan-1 Py / Px
Ɵ=tan-1 10/ -6
Ɵ=59,04°
Ɵ=120,96°
Cuando ya obtenemos los datos más importantes procedemos a realizar el gráfico
Cuando terminamos el gráfico seguimos con la interpretación del vector en las otras formas:
Forma Polar
Para representar un vector en forma polar se utiliza su módulo y dirección expresada en grados, entonces:
͢
P= (11,66 m; 120,96°)
Forma de vectores base
Para representar de esta manera al vector se debe aumentar las letras i-j que vienen a ser vectores base a las componentes rectangulares, seguido por las unidades de medida, entonces:
͢
P= (-6 i + 10 j)m
Forma vector unitario
Para representar a un vector en función de su vector unitario se debe considerar las siguientes características:
1. El vector unitario tiene como módulo al número 1
2. El vector unitario tiene la misma dirección y sentido que el vector de donde proviene est
3. Su cálculo se da de la siguiente manera:
P= |P|µP entonces µP=P / |P|
4. El vector unitario siempre está en función de los vectores base
µP= (Px i + Py j) / |P|
5. El vector unitario no tiene unidades.
Entonces:
µP=-6i + 10j11,66
µP= -0,51i +0,86j
͢
P= 11,66 m (-0,51i + 0,86j) El vector unitario está dado por el módulo y el vector unitario.
Forma geográfica
Para representar un vector en la forma geográfica se debe utilizar el módulo del vector y la dirección esta dad por los ejes geográficos o puntos cardinales así los puntos norte, sur, este, oeste, noreste, sureste, noroeste y suroeste.
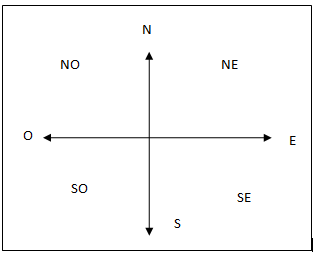
NE significa N45°E
NO significa N45°E
SE significa S45°E
SO significa S45°O
En este caso el ángulo geográfico estaría dado por:
90° - 59,04°= 30,96°

Entonces el vector sería:
͢
P= (11,66 m; N30, 96°O)
Forma cosenos directores
Para representar a un vector de esta manera se utiliza los ángulos directores alfa y beta y β siendo el ángulo alfa medido desde el eje x positivo hacia el vector en sentido horario o antihorario siempre y cuando sea menor a 180°.
El ángulo beta es medido desde el eje y positivo hacia el vector en sentido horario o antihorario.
Para obtener los cosenos directores utilizamos las siguientes fórmulas:
Para alfa ∞: Para beta β:
cos∞= Px /|P| cosβ= Py /|P|
Entonces:
∞= cos-1 Px / |P| β= cos-1 Py /|P|
∞= cos-1 -611,66 β= cos-1 1011,66
∞=122,85° β= 30,95°
Como resultado:
P= 11,66 m (cos 122,85° i + cos 30,95 j)
Derivadas de Funciones Vectoriales
Estudiaremos la derivada de una función vectorial y se establecerán algunas reglas para la derivación de sumas y productos de funciones vectoriales.
P(u) es una función vectorial de la variable escalar u, es decir, el escalar u define por completo el módulo, dirección y sentido del vector .
.
Si representamos el vector P en un eje de cartesianas, se va a representar siempre con un mismo origen O, haciendo variar el escalar u, y el extremo de P describirá una curva en el espacio.
www.youtube.com/watch?v=4q4ztHiL_cE derivadas con funciones vectoriales
P(u) es una función vectorial de la variable escalar u, es decir, el escalar u define por completo el módulo, dirección y sentido del vector
Si representamos el vector P en un eje de cartesianas, se va a representar siempre con un mismo origen O, haciendo variar el escalar u, y el extremo de P describirá una curva en el espacio.
www.youtube.com/watch?v=4q4ztHiL_cE derivadas con funciones vectoriales
sábado, 14 de febrero de 2015
Integrales Vectoriales
Integrales
Vectoriales
¿Qué es una integral vectorial?
Sea un vector
F (q), que depende de la variable q 2, el resultado de la integración de este
vector, es el vector G (q), que al derivarlo con respecto a q, nos da como
resultado F (q). Entonces, como la derivada de un vector constante C es cero,
la integral indefinida del vector F (q) puede ser escrita

Como ya se mencionó, C es un vector constante, es
decir, C no es función de q, ya que dG dq = F (q). Si el escalar q varía
continuamente entre dos límites definidos q1 y q2 y representa la suma de los
elementos del vector diferencial dG = F (q) dq conforme q varía entre q1 y q2
como ha sido discutido. La integral vectorial también puede ser considerada
como la integración escalar de las componentes del integrando.
Clasificación de las integrales vectoriales
Existen tres categorías
generales de integrales de cantidades vectoriales que dependen de varias
variables independientes.
a) El integrando es una función escalar y la
diferencial es un vector, pero ambas, el integrando y la diferencial, son
funciones de n variables independientes q1, q2...qn, es decir
b) El integrando es una función vectorial y la
diferencial una función escalar de las variables escalares independientes q1,
q2...qn, es decir
c) El integrando y la diferencial son funciones
vectoriales de n variables independientes q1, q2...qn, bajo este criterio puede
tenerse dos operaciones:
c.1) Cuando el integrando y la diferencial forman un
producto escalar
c.2) Cuando el integrando y la diferencial forman un
producto vectorial
Estos son los casos generales de la clasificación de
integrales vectoriales, sin embargo, las integrales del tipo c) donde el
integrando y la diferencial son funciones vectoriales, aparecen en muchas de
las aplicaciones en las disciplinas como la mecánica clásica y la
termodinámica; este tipo de integrales de línea involucra necesariamente el
vector desplazamiento dr, el cual forma parte del concepto fundamental de
trabajo y que se expresa a partir de la idea de una integral de línea de la
forma c.1).
viernes, 13 de febrero de 2015
Planos del Triedro de Frenet.
Por último, debemos aprender a calcular y a dominar los conceptos de plano Normal, Rectificante y Osculador.

Como podemos ver en la imagen el Plano Normal es perpendicular al Vector Tangente, el Plano Rectificante es perpendicular al Vector Normal Principal y el Plano Osculador es normal al Vector Binormal. Sus expresiones son:
Plano Normal.
(X−r(t))∗T=0
Plano Rectificante.
(X−r(t))∗N=0
Plano Osculador.
(X−r(t))∗B=0
*Nota. En todas estas expresiones X, es un vector (x,y,z) cualquiera.

{kind=link}
Importancia de los Vectores
Hoy los queremos invitar a visitar esta pagina donde nos muestran de una forma sencilla, didáctica e interactiva la importancia y utilidades de los vectores.
http://interactuandoconlafisica.jimdo.com/1-importancia-de-los-vectores/
También los invitamos a darse la vuelta en el siguiente link:
http://html.rincondelvago.com/vectores-y-sus-aplicaciones.html
Triedro de Frenet Parte 1
El Vector Tangente, Normal y Binormal son vectores unitarios y perpendiculares entre si juntos forman un sistema de referncia movil conocido como Triedro de Frénet-Serret.
Definición del Método.
 Sea T ⊂ R3 una curva y sean γ : I = [a, b] → R3, γ(t) = (x(t), y(t), z(t)) una parametrización regular y α : I′ = [a′, b′] → R3 su parametrización respecto el parámetro arco.
Sea T ⊂ R3 una curva y sean γ : I = [a, b] → R3, γ(t) = (x(t), y(t), z(t)) una parametrización regular y α : I′ = [a′, b′] → R3 su parametrización respecto el parámetro arco.
A partir de la primera y segunda derivada de la parametrización de la curva se construye el triedro de Frenet. En cada punto regular de la curva γ(t), son tres vectores unitarios y ortonormales, T(t), B(t) y N(t).
Es decir, el triedro de Frenet es un sistema de referencia ortonormal que nos proporciona información sobre la curva. Decimos que es un sistema de referencia móvil, porque se desplaza por la curva según la recorremos.
A partir de los vectores del triedro de Frenet construiremos planos (el osculador, el normal y el rectificante). También introduciremos los conceptos de curvatura y torsión, que nos darán información de cómo se “dobla” y “retuerce” la curva en el espacio.
Para llegar calcular el Triedro de Frenet en cualquier punto de una curva, lo primero que debemos hacer es parametrizarla (en el caso de que no lo este). Una vez que hallamos parametrizado la curva en cuestión, generalmente mediante coordenadas polares, podemos comenzar a “construir” nuestro Triedro de Frenet.
Suscribirse a:
Comentarios (Atom)